扫描手机二维码
开通时间:..
最后更新时间:..
 赞
赞
的个人主页 http://faculty.dlut.edu.cn/yexinchen/zh_CN/index.htm

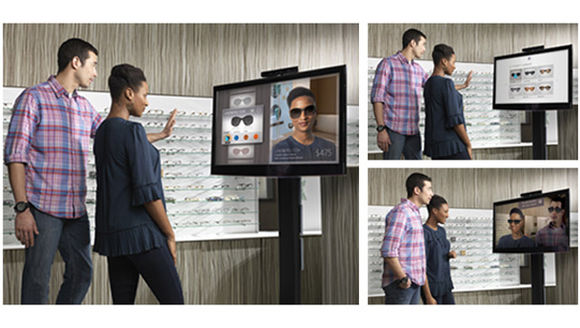
随着网络技术和移动互联网的发展,移动终端设备,包括手机、平板电脑、虚拟/增强现实设备(VR/AR)等,逐渐取代了移动性低,便携性差的传统PC设备,成为了设备发展的重要趋势,也将成为大数据应用的重要出入口。同时,移动终端设备的人机交互方式也在不断升级进化,越来越直观简便和自然的人机交互技术仍将是未来移动终端的重要突破方向。
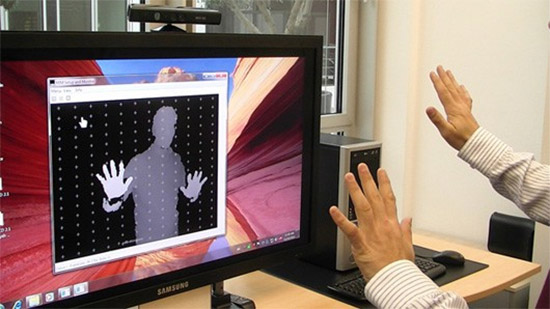
深度信息,做为现实场景中的第三维度信息,记录和反映了物体在空间环境中的相对位置,是三维场景还原、3D 扫描和建模、立体视频渲染和即时定位与地图构建(SLAM)等应用的必备条件之一,成为人机交互技术的一个重要感知来源。由于移动设备本身不具备深度传感功能,需要借助额外的深度传感器来感知场景深度。工业界一直致力于研发便携型深度传感器,很多产品已经推出,例如谷歌的Google Tango 手机,配备了深度摄像头及其他
传感器,实时对周围环境进行3D 建模;微软的AR 眼镜HoloLens 利用深度相机对周围环境进行3D 成像等。此类设备均采用结构光 (structured light) 原理来测量深度,实时获取三维场景的深度图。