扫描手机二维码
开通时间:..
最后更新时间:..
 赞
赞
的个人主页 http://faculty.dlut.edu.cn/yexinchen/zh_CN/index.htm

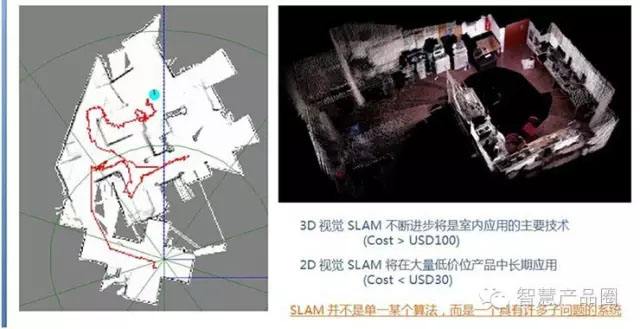
SLAM是Simultaneous Localization and Mapping的缩写,意为“同时定位与建图”。slam说白就一句话:同时解决精确定位和环境绘制问题。首先是开场白,这项技术同时解决定位和环境绘制的问题:定位是一种精确的定位,包含机器位置、朝向、高度,不同于GPS;环境绘制例如使用SLAM,可以进一步恢复出三维,例如我们绕着城市拍一圈,就可以重建出三维城市的地图。
SLAM是智能机器和增强混合现实的关键技术,用商业的话来说就是『刚需』。SLAM可以使用各种各样的传感器信息:从图像、多图像、深度信息、GPS、IMU、乃至车轮齿轮转了几圈,都可以作为SLAM的输入信息来达到目的。
如果SLAM技术加上各式各样的深度学习+识别技术,可以理解为一个智能机器具备了学习陌生环境、解决自己『在哪儿』,还通过识别解决了『这是什么』的两个基本问题。能解决这两个基本问题的软件算法,就像是智能机器的『大脑』一样,具备了一定程度的学习和反馈的基础。有了这样的基础,我们才能使机器更『聪明』的看懂这个世界,并进一步向我们所期待的反馈方式去开发更高层的功能。

近年来,随着资源的不断消耗,人口激增,海洋研究和开发逐渐成为人类赖以生存新的发展空间,因此作为海洋探测部分的水下机器人得到广泛的应用。智能水下机器人技术是水下机器人系统研究领域的热点,开展智能水下机器人基于视觉的目标探测和导航技术研究,也是实现水下机器人在恶劣且复杂多变的环境中进行水下侦查、作业的关键技术之一。
目前常用的一种导航方式是“跟随路径导引”,即机器人通过对能感知到某些外部的连续路径参考信息做出相应的反应来导航。这种方法的优点是可靠性较高,但功能单一,如不能在行进的同时对目标进行识别、避障,对环境的适应能力较弱、灵活性较差、维护成本较高,因此限制了其在移动机器人中的应用。随着计算机技术、数字图像处理技术及图像处理硬件的发展,基于计算机视觉的导航方式在机器人导航中得到广泛关注。机器人自主定位导航技术中包括定位、地图创建与路径规划(运动控制)。同时,作为自主定位导航技术的重要突破口,SLAM技术也成为关注焦点。
