扫描手机二维码
开通时间:..
最后更新时间:..
 赞
赞
的个人主页 http://faculty.dlut.edu.cn/yexinchen/zh_CN/index.htm

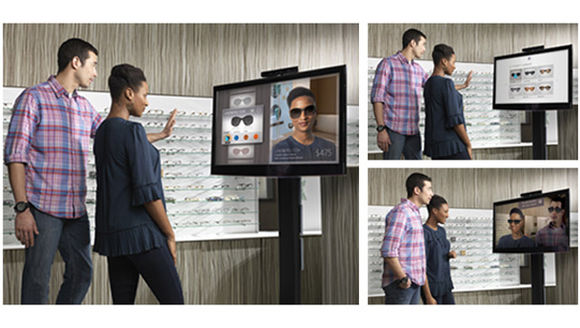
随着网络技术和移动互联网的发展,移动终端设备,包括手机、平板电脑、虚拟/增强现实设备(VR/AR)等,逐渐取代了移动性低,便携性差的传统PC设备,成为了设备发展的重要趋势,也将成为大数据应用的重要出入口。同时,移动终端设备的人机交互方式也在不断升级进化,越来越直观简便和自然的人机交互技术仍将是未来移动终端的重要突破方向。
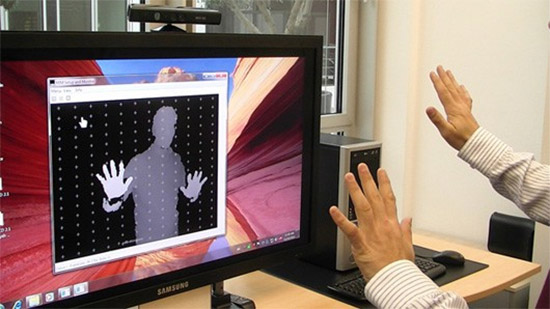
深度信息,做为现实场景中的第三维度信息,记录和反映了物体在空间环境中的相对位置,是三维场景还原、3D 扫描和建模、立体视频渲染和即时定位与地图构建(SLAM)等应用的必备条件之一,成为人机交互技术的一个重要感知来源。由于移动设备本身不具备深度传感功能,需要借助额外的深度传感器来感知场景深度。工业界一直致力于研发便携型深度传感器,很多产品已经推出,例如谷歌的Google Tango 手机,配备了深度摄像头及其他
传感器,实时对周围环境进行3D 建模;微软的AR 眼镜HoloLens 利用深度相机对周围环境进行3D 成像等。此类设备均采用结构光 (structured light) 原理来测量深度,实时获取三维场景的深度图。

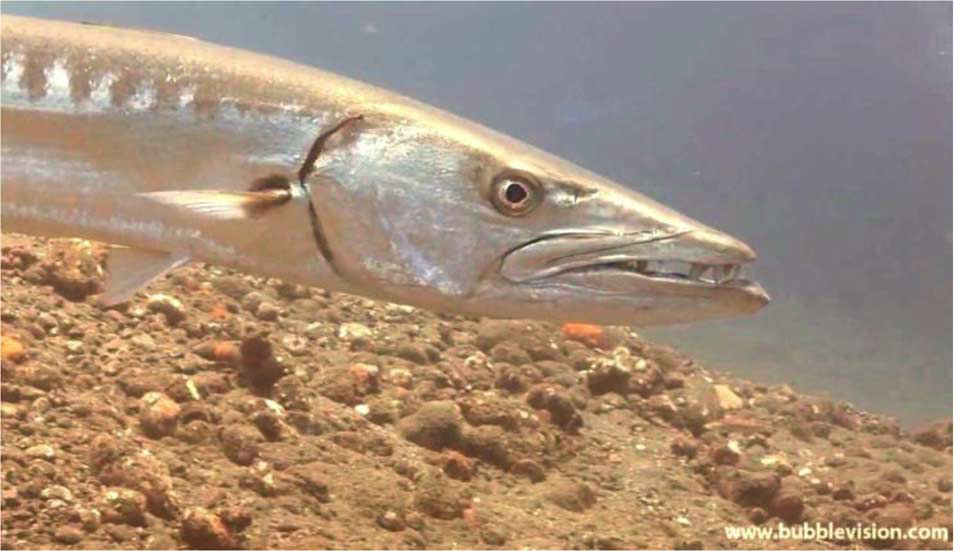
千百年来人类从未停下对海洋的探索脚步,了解海洋的奥秘、变化、成因不仅可以帮助人们更好地认识到海洋和自然的规律,而且可以更好地造福人类。对海洋的开发利于人类利用自然,改造自然,对当今社会和子孙后代的价值和意义不言而喻。海洋中丰富的生物资源、海洋能源、油气资源等具有不可估量的经济价值和社会价值,未来的海洋能源发展有着良好的前景,国家也将更多的人力物力投入到海洋发展中来。
所以在研究过程中,尤其是在检测海洋生物、评估水下地质环境、水生物捕捞等科学任务中,获得清晰的水下图像显得尤为重要。然而由于海洋浮游生物、水中悬浮颗粒、光在水下传播特性等因素的影响,直接的水下成像往往会有低能见度、低饱和度、颜色失真等问题,为科学研究带来阻力。一方面,不同波长的光在水下传输过程中衰减程度不同,波长最短的红光衰减幅度最大而蓝光衰减程度最小,导致水下降质图像总体偏蓝或偏绿;另一方面,物体反射的光在传输过程中会被水中悬浮颗粒或浮游生物不同程度地吸收或散射,这部分散射杂光进入相机后会为水下图像带来雾效应,且水体越浑浊雾效应越严重,能见度和对比度就越低。
因此对水下成像质量进行改善的主要任务一是平衡图像颜色,即图像增强和颜色校正技术;二是去除雾效应,即图像复原技术。

图像语义分割可以说是图像理解的基石性技术,在自动驾驶系统(具体为街景识别与理解)、无人机应用(着陆点判断)以及穿戴式设备应用中举足轻重。语义分割顾名思义就是将像素按照图像中表达语义含义的不同进行分组(Grouping)/分割(Segmentation)。
从20世纪70年代开始,随着CT的发明,医学图像的处理在医学领域中占有越来越重要的地位。医学图像分割在医学研究、临床诊断、病理分析、影像信息处理等医学研究与实践领域中有着广泛的应用和研究价值。所谓医学图像分割,就是根据医学图像的某种相似性特征(如亮度、颜色、纹理、面积、形状、位置、局部统计特征或频谱特征等)将医学图像划分为若干个互不相交的“连通”区域的过程,相关特征在同一区域内表现出一致性或相似性,而在不同区域间表现出明显的不同,也就是说在区域边界上的像素存在某种不连续性。

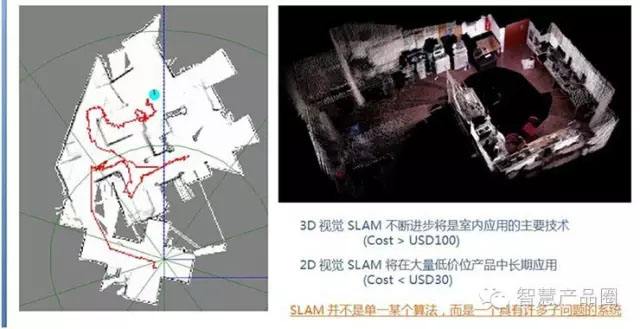
SLAM是Simultaneous Localization and Mapping的缩写,意为“同时定位与建图”。slam说白就一句话:同时解决精确定位和环境绘制问题。首先是开场白,这项技术同时解决定位和环境绘制的问题:定位是一种精确的定位,包含机器位置、朝向、高度,不同于GPS;环境绘制例如使用SLAM,可以进一步恢复出三维,例如我们绕着城市拍一圈,就可以重建出三维城市的地图。
SLAM是智能机器和增强混合现实的关键技术,用商业的话来说就是『刚需』。SLAM可以使用各种各样的传感器信息:从图像、多图像、深度信息、GPS、IMU、乃至车轮齿轮转了几圈,都可以作为SLAM的输入信息来达到目的。
如果SLAM技术加上各式各样的深度学习+识别技术,可以理解为一个智能机器具备了学习陌生环境、解决自己『在哪儿』,还通过识别解决了『这是什么』的两个基本问题。能解决这两个基本问题的软件算法,就像是智能机器的『大脑』一样,具备了一定程度的学习和反馈的基础。有了这样的基础,我们才能使机器更『聪明』的看懂这个世界,并进一步向我们所期待的反馈方式去开发更高层的功能。

近年来,随着资源的不断消耗,人口激增,海洋研究和开发逐渐成为人类赖以生存新的发展空间,因此作为海洋探测部分的水下机器人得到广泛的应用。智能水下机器人技术是水下机器人系统研究领域的热点,开展智能水下机器人基于视觉的目标探测和导航技术研究,也是实现水下机器人在恶劣且复杂多变的环境中进行水下侦查、作业的关键技术之一。
目前常用的一种导航方式是“跟随路径导引”,即机器人通过对能感知到某些外部的连续路径参考信息做出相应的反应来导航。这种方法的优点是可靠性较高,但功能单一,如不能在行进的同时对目标进行识别、避障,对环境的适应能力较弱、灵活性较差、维护成本较高,因此限制了其在移动机器人中的应用。随着计算机技术、数字图像处理技术及图像处理硬件的发展,基于计算机视觉的导航方式在机器人导航中得到广泛关注。机器人自主定位导航技术中包括定位、地图创建与路径规划(运动控制)。同时,作为自主定位导航技术的重要突破口,SLAM技术也成为关注焦点。
深度学习Deep Learning是机器学习的一个分支,属于人工智能的新领域。深度学习通过组合低层特征形成更加抽象的高层表示属性类别或特征,以发现数据的分布式特征表示。2006年,机器学习大师Hinton等人在《科学》 上发表的一篇论文,开启了深度学习的浪潮。他提出了深度置信网络的概念,成功地利用贪心策略逐层训练由限制玻尔兹曼机组成的深层架构,解决了以往深度网络训练困难的问题。
2011年,微软语音识别通过采用深度学习技术,降低了语音识别20%-30%的错误率,是深度学习领域在十多年来的最大的突破进展。
2012年,人工智能的专家吴恩达联手分布式系统顶级学者JeffDean一起完成Google Brain系统,借助并行计算技术训练出一个超级深度神经网络,该神经网络包含10亿个以上的神经元,在图像分类方面取得了惊人的效果。该项目通过无监督的方式训练深度神经网络,让图像进行自动聚类,成功从没有任何标签的海量图片中识别出了猫脸。同年在21世纪计算大会上微软首席研究官Rick Rashid演示了一个基于深度学习的自动同声传译系统,实时将他的英文演讲转换成音色相近并且规范的中文演讲,而错误率仅7%,而发音却十分顺畅,该系统良好的效果赢得了所有嘉宾的一致好评。
2015年,微软推出了高效灵活的深度学习编程框架MXNet,可以让使用者很快地写出深度学习的程序。
Deep Learning的常用模型:
1. Auto Encoder自动编码器
2. Sparse Coding稀疏编码
3. Restricted Boltzmann Machine (RBM)限制波尔兹曼机
4. Deep Belief Networks深信度网络
5. Convolutional Neural Networks卷积神经网络
Deep Learning的常用优化方法:
传统的优化方法主要有:
1.梯度下降法2.牛顿法3.共轭梯度法
目前流行的一些方法有:
1.随机梯度下降算法(SGD)
2.批量梯度下降(Batch Gradient Descent,BGD)和Mini-batch梯度下降
3. Momentum和Nesterov Momentum
4. Adagrade,Adadelta,RMSprop,Adam等算法
