扫描手机二维码
开通时间:..
最后更新时间:..
 赞
赞
的个人主页 http://faculty.dlut.edu.cn/yexinchen/zh_CN/index.htm

DRM-SLAM: Towards Dense Reconstruction of Monocular SLAM with Scene Depth Fusion
Xinchen Ye*, Xiang Ji, Baoli Sun, Shenglun Chen, Zhihui Wang, Haojie Li
Dalian University of Technology
* Corresponding author
Abstract
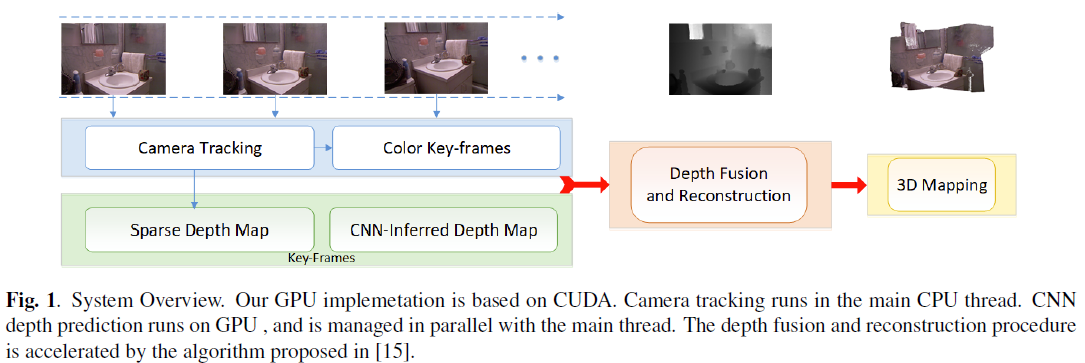
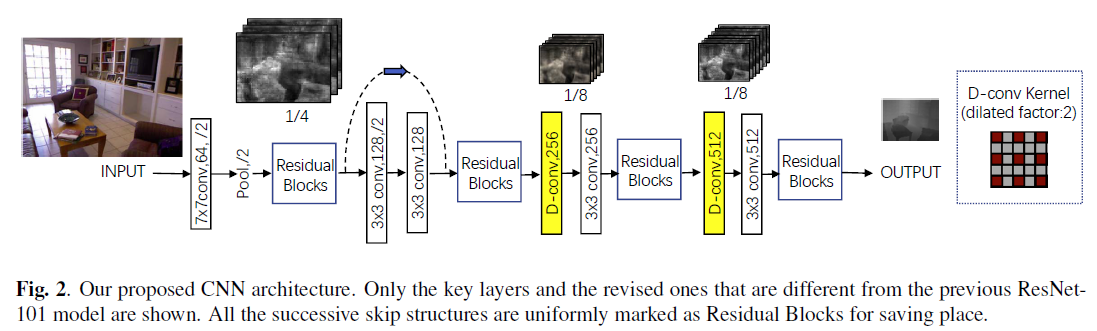
Real-time monocular visual SLAM approaches relying on building sparse correspondences between two or multiple views of the scene, are capable of accurately tracking camera pose and inferring structure of the environment. However, these methods have the common problem, i.e., the reconstructed 3D map is extremely sparse. Recently, convolutional neural network (CNN) is widely used for estimating scene depth from monocular color images. As we observe, sparse map-points generated from epipolar geometry are locally accurate, while CNN-inferred depth map contains high-level global context but generates blurry depth boundaries. Therefore, we propose a depth fusion framework to yield a dense monocular reconstruction that fully exploits the sparse depth samples and the CNN-inferred depth. Color key-frames are employed to guide the depth reconstruction process, avoiding smoothing over depth boundaries. Experimental results on benchmark datasets show the robustness and accuracy of our method.
Index Terms— Dense reconstruction, Visual SLAM, Monocular, Sparse map-point, Depth prediction.
Publications
[1] Xinchen Ye*; Xiang Ji; Baoli Sun; Shenglun Chen; Zhihui Wang; Haojie Li; DRM-SLAM: Towards Dense Reconstruction of Monocular SLAM with Scene Depth Fusion, Neurocomputing, 396: 76-91, 2020.
[2] Xiang Ji, Xinchen Ye*, Hongcan Xu, Haojie Li, Dense Reconstruction from Monocular SLAM with Fusion of Sparse Map-Points and CNN-Inferred Depth. IEEE International Conference on Multimedia and Expo, ICME 2018, San Diego, USA. (CCF-B)
